1
Introduction to FPGA design
J. Serrano
CERN, Geneva, Switzerland
Abstract
This paper presents an introduction to digital hardware design using Field
Programmable Gate Arrays (FPGAs). After a historical introduction and a
quick overview of digital design, the internal structure of a generic FPGA is
discussed. We then describe the design flow, i.e., the steps needed to go from
design idea to actual working hardware. Digital signal processing is an
important area where FPGAs have found many applications in recent years.
Therefore a complete section is devoted to this subject. The paper finishes
with a discussion of important peripheral concepts essential for success in
any project involving FPGAs.
1 Historical introduction
Digital electronics is concerned with circuits which represent information using a finite set of output
states [1]. Most of the applications use in fact just two states, which are often labelled ‘0’ and ‘1’.
Behind this choice is the fact that the whole Boolean formalism then becomes available for the
solution of logic problems, and also that arithmetic using binary representations of numbers is a very
mature field.
Different mappings between the two states and the corresponding output voltages or currents
define different logic families. For example, the Transistor–Transistor Logic (TTL) family defines an
output as logic ‘1’ if its voltage is above a certain threshold (typically 2.4 V). For the same family, if
we set the input threshold for logic ‘1’ as 2 V, we will have a margin of 0.4 V which will allow us to
interconnect TTL chips inside a design without the risk of misinterpretation of logic states. This
complete preservation of information even in the presence of moderate amounts of noise is what has
driven a steady shift of paradigm from analog to digital in many applications. Here we see as well
another reason for the choice of binary logic: from a purely electrical point of view, having only two
different values for the voltages or currents used to represent states is the safest choice in terms of
design margins.
Historically, TTL chips from the 74 series fuelled an initial wave of digital system designs in
the 1970s. From this seed, we shall focus on the separate branches that evolved to satisfy the demand
for programmability of different logic functions. By programmability, we mean the ability of a
designer to affect the logic behaviour of a chip after it has been produced in the factory.
A first improvement in the direction of programmability came with the introduction of gate
arrays, which were nothing else than a chip filled with NAND gates that the designer could
interconnect as needed to generate any logic function he desired. This interconnection had to happen
at the chip design stage, i.e., before production, but it was already a convenient improvement over
designing everything from scratch. We had to wait until the introduction of Programmable Logic
Arrays (PLAs) in the 1980s to have a really programmable solution. These were two-level AND-OR
structures with user-programmable connections. Programmable Array Logic (PAL) devices were an
improvement in performance and cost over the PLA structure. Today, these devices are collectively
called Programmable Logic Devices (PLDs).
231

2
The next stage in sophistication resulted in Complex PLDs (CPLDs), which were nothing else
than a collection of multiple PLDs with programmable interconnections. FPGAs, in turn, contain a
much larger number of simpler blocks with the attendant increase in interconnect logic, which in fact
dominates the entire chip.
2 Basics of digital design
A typical logic design inside an FPGA is made of combinatorial logic blocks sandwiched in between
arrays of flip-flops, as depicted in Fig. 1. A combinatorial block is any digital sub-circuit in which the
current state of the outputs only depends, within the electrical propagation time, on the current state of
the inputs. To this group belong all the well-known basic logic functions such as the two-input AND,
OR and any combination of them. It should be noted, that logic functions of arbitrary complexity can
be derived from these basic blocks. Multiplexers, encoders and decoders are all examples of
combinatorial blocks. The input in Fig. 1 might be made of many bits. The circuit is also supplied with
a clock, which is a simple square wave oscillating at a certain fixed frequency. The two flip-flops in
the circuit, which might be flip-flop blocks in the case of a multi-bit input, are fed with the same clock
and propagate the signals from their D inputs to their Q outputs every time there is a rising edge in the
clock signal. Apart from that very specific instant in time, D is disconnected from Q.
Fig. 1: A typical digital design
The structure of the circuit is thus very simple, and its application as a template covers the vast
majority of digital design requirements in standard applications, such as the control of particle
accelerators. The designer only needs to ensure that the worst-case propagation delay between any of
the inputs to the combinatorial logic block and any of its outputs is less than one clock period. If that
condition is satisfied, the inputs to the second stage of flip-flops will be stable by the time the next
clock edge reaches them. As we shall see later, the process of ensuring this timing closure is nowadays
automated, so the designer need only be concerned with the specification of the logic behaviour of the
circuit.
The main merit of this design strategy, called synchronous design, is that the analysis of the
possible timing failures and race conditions is greatly simplified. One might design otherwise, feeding
for example the clock input of a flip-flop from the output of a combinatorial clock, in what is called a
‘gated clock’ circuit, and that design might give good results during simulation. But then, slight
changes in the different delays of the signals might result in circuit malfunction. Slight changes of
delays in the synchronous design paradigm can be easily accommodated by taking some safety margin
in the maximum allowed time for any combinatorial signal path. This simple recipe contrasts with the
‘many-body problem’ of examining effects of delay changes in asynchronous designs.
J. SERRANO
232
3
3 FPGA structure
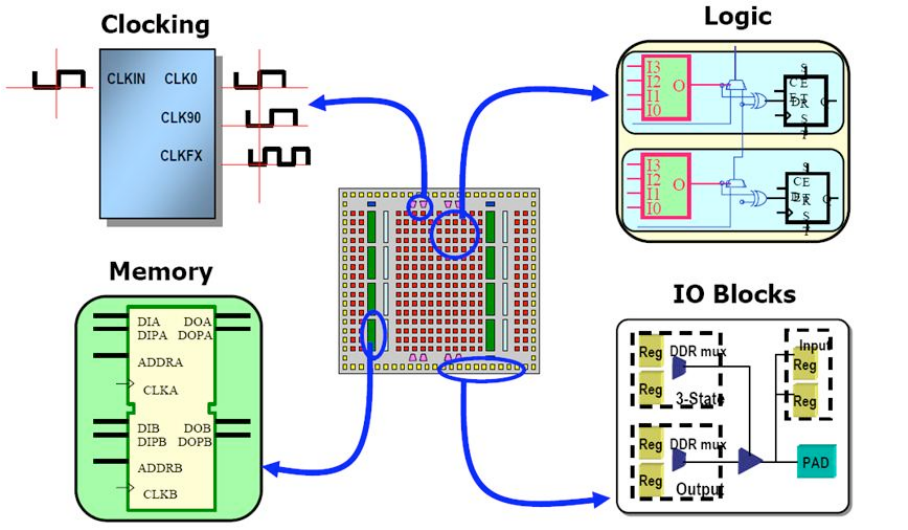
A typical modern FPGA (see Fig. 2) provides the designer with programmable logic blocks that
contain the pool of combinatorial blocks and flip-flops to be used in the design. In addition, vendors
acknowledge the fact that logic is often used in conjunction with memory, and typically include
variable amounts of static Random Access Memory (RAM) inside their chips. Clock conditioning has
also become commonplace, and support in the form of Delay Locked Loops (DLLs) and Phase Locked
Loops (PLLs) is also provided inside the same silicon chip. Finally, an FPGA chip does not lead a
solitary life isolated from the rest of the world. It needs to be easily interfaced to other chips or
external signals. In order to make this interfacing easier, FPGA vendors have invested a great deal of
effort in enhancing the flexibility of the input/output blocks behind the chip pads. Each pad can serve
as an input, an output, or both. The list of electrical standards supported is extensive, and novel
techniques for maximizing bandwidth, such as clocking data in using both edges of the clock, are
widely supported.
Fig. 2: Internal structure of a generic FPGA (courtesy Xilinx, Inc.)
All the components shown in Fig. 2, however, typically account for less than 20% of the silicon
inside an FPGA chip. What is not shown is the large amounts of programmable interconnect and the
auxiliary circuits which ‘program’ the generic blocks to become a well-defined piece of logic. This
silicon inefficiency is the price to pay for programmability, and is also the reason why FPGAs have
traditionally been more successful in high-end, low-volume applications in the past, with Application-
Specific Integrated Circuits (ASICs) taking a leading role for high-volume applications. With Moore’s
law, however, the line between high-end and low-end applications is continuously shifting, and
FPGAs are more and more used in domains which used to be dominated by ASICs and Digital Signal
Processors (DSPs).
To overcome the silicon inefficiency problem, FPGA vendors often include hardwired
Intellectual Property (IP) cores inside the chips for functions identified as recurrent in many designs.
These non-programmable blocks include general-purpose processors, high-speed serial interfaces,
arithmetic blocks and Ethernet Medium Access Control (MAC) units.
INTRODUCTION TO FPGA DESIGN
233
4
4 Design flows
The designer facing a design problem must go through a series of steps between initial ideas and final
hardware. This series of steps is commonly referred to as the ‘design flow’. First, after all the
requirements have been spelled out, a proper digital design phase must be carried out. It should be
stressed that the tools supplied by the different FPGA vendors to target their chips do not help the
designer in this phase. They only enter the scene once the designer is ready to translate a given design
into working hardware.
The most common flow nowadays used in the design of FPGAs involves the following
subsequent phases:
– Design entry. This step consists in transforming the design ideas into some form of
computerized representation. This is most commonly accomplished using Hardware Description
Languages (HDLs). The two most popular HDLs are Verilog and the Very High Speed
Integrated Circuit HDL (VHDL) [2]. It should be noted that an HDL, as its name implies, is only
a tool to describe a design that pre-existed in the mind, notes, and sketches of a designer. It is
not a tool to design electronic circuits. Another point to note is that HDLs differ from
conventional software programming languages in the sense that they don’t support the concept
of sequential execution of statements in the code. This is easy to understand if one considers the
alternative schematic representation of an HDL file: what one sees in the upper part of the
schematic cannot be said to happen before or after what one sees in the lower part.
– Synthesis. The synthesis tool receives HDL and a choice of FPGA vendor and model. From
these two pieces of information, it generates a netlist which uses the primitives proposed by the
vendor in order to satisfy the logic behaviour specified in the HDL files. Most synthesis tools go
through additional steps such as logic optimization, register load balancing, and other techniques
to enhance timing performance, so the resulting netlist can be regarded as a very efficient
implementation of the HDL design.
– Place and route. The placer takes the synthesized netlist and chooses a place for each of the
primitives inside the chip. The router’s task is then to interconnect all these primitives together
satisfying the timing constraints. The most obvious constraint for a design is the frequency of
the system clock, but there are more involved constraints one can impose on a design using the
software packages supported by the vendors.
– Bit stream generation. FPGAs are typically configured at power-up time from some sort of
external permanent storage device, typically a flash memory. Once the place and route process is
finished, the resulting choices for the configuration of each programmable element in the FPGA
chip, be it logic or interconnect, must be stored in a file to program the flash.
Of these four phases, only the first one is human-labour intensive. Somebody has to type in the
HDL code, which can be tedious and error-prone for complicated designs involving, for example, lots
of digital signal processing. This is the reason for the appearance, in recent years, of alternative flows
which include a preliminary phase in which the user can draw blocks at a higher level of abstraction
and rely on the software tool for the generation of the HDL. Some of these tools also include the
capability of simulating blocks which will become HDLs with other blocks which provide stimuli and
processing to make the simulation output easier to interpret. The concept of hardware co-simulation is
also becoming widely used. In co-simulation, stimuli are sent to a running FPGA hosting the design to
be tested and the outputs of the design are sent back to a computer for display (typically through a
Joint Test Action Group (JTAG), or Ethernet connection). The advantage of co-simulation is that one
is testing the real system, therefore suppressing all possible misinterpretations present in a pure
simulator. In other cases, co-simulation may be the only way to simulate a complex design in a
reasonable amount of time.
J. SERRANO
234

5
5 Digital signal processing using FPGAs
Clearly the main advantage of FPGAs over conventional DSPs to perform digital signal processing is
their capability to exploit parallelism, i.e., replication of hardware functions that operate concurrently
in different parts of the chip. Figure 3 shows how a Finite Impulse Response (FIR) filter could be
implemented in both platforms. While the DSP needs 256 clock ticks to calculate an output sample,
the FPGA generates a new sample for every clock cycle. Even if DSP chips can be clocked faster than
FPGAs, the difference is in no case larger than a factor of 10. If one adds that many such filters can
exist concurrently and interact inside the same FPGA, it is easy to see that DSPs are no match for
FPGAs in high-performance signal processing applications [3].
Fig. 3: FIR filter comparison between DSP and FPGA
Another advantage of FPGAs is the flexibility for trading off between area and speed until very
late in the design cycle. Figure 4 shows three different implementations of a sum of products, from a
full expansion using more silicon to a minimalist implementation which takes more clock cycles to
generate a result.
Fig. 4: Illustrating the speed/area trade-off in FPGAs
In this section, we give a basic introduction to fixed-point arithmetic and then touch briefly
upon two interesting techniques for processing fixed-point signals: distributed arithmetic and the
COordinate Rotation DIgital Computer (CORDIC) algorithm. The interested reader will find more
details in the references at the end of this document.
INTRODUCTION TO FPGA DESIGN
235

6
5.1 Fixed-point arithmetic
In FPGA design, one typically uses a two’s complement fixed-point representation of numbers.
Floating point design is perfectly feasible, but the high-performance applications typically targeted by
FPGAs can very often be served adequately by using enough bits in a fixed-point representation. This
is another advantage of FPGAs: the possibility to tailor the bus widths in different parts of the design
to satisfy the final precision requirements. Figure 5 shows an example of fixed-point two’s
complement representation, where we have taken three of the bits for the integer part and five for the
fractional part. In reality, as we shall see, an adder or any other arithmetic circuit does not know about
our decision on how many bits to interpret as fractional. This is purely an interpretational issue, so for
all practical purposes, one can think of fixed-point arithmetic as integer arithmetic.
Fig. 5: Fixed-point two’s complement representation of signed numbers using three integer bits
and five fractional bits
As an introductory example, let us see how one can make a circuit that performs simple addition
or subtraction using logic gates. This will be a combinatorial circuit with nine inputs (say four per
input and one for controlling if we add or subtract) and five outputs (the final result). Notice that we
need to have one extra bit in the output because the addition/subtraction of two 4-bit numbers can
result in a 5-bit number.
We start with the full adder circuit of Fig. 6. It is easy to see that this circuit made of AND, OR
and XOR gates takes two bits and a carry (maybe from a preceding stage) and generates a proper sum
and carry out.
Fig. 6: A full adder circuit
Out of many of these Full Added (FA) cells, one can build the circuit of Fig. 7, which takes two
4-bit signed numbers and adds them together if the Control signal is ‘0’. Otherwise, a subtraction is
performed. Although these days one would generate this circuit with a simple HDL statement, it is
enlightening to understand what the underlying hardware looks like. More complicated blocks to
multiply, divide, take a square root, etc. can be synthesized using these basic blocks and the reader is
referred to the specialized literature for details [3].
J. SERRANO
236

7
Fig. 7: 4-bit full add/subtract
One question that arises immediately is what to do with this arithmetic bus that gets wider and
wider as we cascade more and more operations one after the other. At some point, the bus width will
become inconveniently large. We will be wasting bits with unnecessary information, and our timing
constraints could be compromised as the combinatorial paths traverse more layers of logic before
hitting the next flip-flop. One example could be a feedback system that generates an analog signal
towards a Radio Frequency (RF) cavity using a 16-bit Digital to Analog Converter (DAC) fed by an
FPGA. There would be no point in keeping an internal representation of say 50 bits and then collapse
it all at the very end to feed the DAC with only 16 bits. The solution to this problem is to control the
width after each operation by judiciously choosing a suitable number of bits to represent the
intermediate results. Figure 8 shows two ways of doing this: truncation and rounding. In truncation,
some of the fractional bits are taken out before feeding the result to the next stage. In rounding, a ‘1’ is
added to the most significant bit (of the ones to be taken out) before truncation.
Fig. 8: Truncation vs. rounding in fixed-point representation
Notice that in two’s complement, truncation is a biased operation. The output of truncation will
always be a smaller number than the input. If an unbiased scheme is needed, then rounding should be
used at the expense of the extra addition involved. The loss in precision incurred by taking some of the
bits out can be studied statistically by modelling rounding or truncation as a source of white noise with
an amplitude dependent on the number of bits eliminated [4].
INTRODUCTION TO FPGA DESIGN
237

8
5.2 Distributed arithmetic
Digital signal processing is all about sums of products. For example, if a generic filter is fed with an
input sequence x[n], we can write its output as
!
"
=
#=
1
0
][][
N
n
nxncy
(1)
where c[n] are the filter coefficients. If these coefficients are constant, and assuming the input signal to
be B bits wide, we can rearrange the terms in a sequence that will end up suggesting an alternative
hardware implementation. We begin by re-writing Eq. (1) as
! !
"
=
"
=
#
$
%
&
'
(
))=
1
0
1
0
2][][
N
n
B
b
b
b
nxncy
(2)
where x
b
[n] is bit number b of x[n], i.e., either ‘0’ or ‘1’. After rearranging:
! !
"
=
"
=
#
$
%
&
'
(
))=
1
0
1
0
][][2
B
b
N
n
b
b
nxncy
(3)
and the term in parentheses can be implemented as a Look Up Table (LUT) with N inputs, as
suggested in Fig. 9.
Fig. 9: Distributed arithmetic implementation of a filter
The filter implemented in this way has no need of hardware multipliers, and generates a result
every B ticks, independent of the filter length N. By increasing the number of LUTs and replicating
hardware, one can trade off latency versus area. The extreme case would be full parallelization:
replicating B times to get one output sample per clock tick.
5.3 The CORDIC algorithm
The CORDIC is a circuit that iteratively rotates an input vector (x
(1)
, y
(1)
) and generates an output
vector (x
(2)
, y
(2)
), where x and y are the Cartesian coordinates of the vectors. There are two modes of
operation. In rotation mode, an angle accumulator is set to the desired rotation angle, and the CORDIC
approximates that angle by performing elementary rotations of decreasing angles. The output is the
input vector rotated by the specified angle. In vectoring mode, the CORDIC block rotates the input
vector using the same table of decreasing angles until the resulting vector is aligned with the
J. SERRANO
238

9
horizontal axis. In this mode, the result is the angle accumulated throughout the whole rotation
process. The trick in the CORDIC algorithm is to constrain the set of angles to those whose tangent
can be expressed as 2
-i
, i being the iteration index. Then the rotation operations for these angles do not
need any specific multipliers, since a multiplication by 2
-i
is just a right-shift by i places. This produces
a very efficient hardware implementation in terms of area and speed. Each iteration generates roughly
an extra bit of precision in the result. Among the several things one can calculate with a CORDIC, we
can highlight the following:
– Magnitude of a vector: it is found on the x of the output vector after operating the CORDIC in
vectoring mode.
– Sine and cosine of an angle: found by feeding an input vector with x = 1, y = 0 and setting the
CORDIC to work in rotation mode with the specified angle.
More uses of the CORDIC as well as a detailed description on its internal features and ways to
accelerate it can be found in Ref. [5].
6 FPGAs in real-world designs
This section is devoted to design aspects which are encountered in real projects. The FPGA designer
will find none of these problems while simulating behavioural HDL in a computer, but they are
paramount for the success of any FPGA project.
6.1 Performance-boosting techniques
We have already discussed the benefits of synchronous design. The place-and-route tool will analyse
the timing constraints and optimize the placement and routing in such a way as to meet these
constraints. But what if it cannot? If the delays due to propagation through individual gates are already
higher than the specified clock period, there is nothing the tool can do to meet the specification.
Remember, the tool’s degrees of freedom are just related to where to place blocks and how to
interconnect them. The interconnect delay will never be less than 0, and it has to be added to gate
propagation delays which are fully determined by the synthesized netlist. So if the gate propagation
delays already exceed the specified clock period, it’s mission impossible for the place-and-route tool.
Delays in modern designs can be as much as 90% due to routing and 10% due to logic. The
routing bit is due to long routes and capacitive loading on the nets. Many synthesis tools automatically
insert buffers in some nets to provide more current to drive the capacitive loads, therefore decreasing
routing delay, as depicted in Fig. 10.
Fig. 10: Automatic buffer insertion example
INTRODUCTION TO FPGA DESIGN
239

10
The automatic replication of registers is another useful technique. This can be set as an option
for those synthesis tools that support it, or it can be done by hand at the HDL level. Figure 11
illustrates the principle. The nets coming out of the flip-flop after the producer are going to four
different destinations, potentially covering great lengths inside the chip. After the flip-flop is
duplicated, each of the outputs only has to serve two destinations, so the timing constraints become
easier. If there were combinatorial logic after the first flip-flop, it would also be replicated. The HDL
specification is therefore fully respected.
Fig. 11: Automatic replication of registers
Another problem case concerns long combinatorial delays between flip-flop stages. As we said
earlier, there is nothing that the place-and-route tool can do in this case. The solution must come from
the synthesis tool or the designer. Retiming — also known as register balancing — is a technique that
can be used in these cases. Figure 12 shows how it works. Some of the combinatorial logic is passed to
the next stage in the pipeline so that the maximum delay in each stage remains within the
specifications.
Fig. 12: Retiming
J. SERRANO
240

11
If retiming is not possible, one can always try pipelining, provided the circuit is not sensitive to
the latency in the extra number of clock cycles. The principle is explained in Fig. 13. It consists in
breaking up the large combinatorial delay by inserting flip-flop stages after intermediate results. In this
case, it is better to modify the original design rather than using the synthesis tool, since it could lead to
an incoherency between HDL sources and final hardware.
Fig. 13: Pipelining
Finally, time-multiplexing in conjunction with hardware replication can also be a powerful tool
to prevent timing pathologies. The principle, depicted in Fig. 14, consists in splitting a data path in
two, making each branch work at half the speed, and recombining the results at the end to regenerate a
data flow at the design clock frequency.
Fig. 14: Time-multiplexing
As an example of how these tools can be used in practical cases, let us examine a performance
problem that arose in the phase filter of a PLL used to track bunch frequency in CERN’s PS. Figure 15
shows the original filter design, a first-order Infinite Impulse Response (IIR) filter implementing the
transfer function y[n+1] = ay[n] + bx[n]. Signal y goes back to the output flip-flop through a multiplier
INTRODUCTION TO FPGA DESIGN
241

12
and an adder, and these combinatorial delays are not compatible with the clock frequency. What can
we do?
Fig. 15: A simple IIR filter with a performance problem
We can calculate y[n+2] = ay[n+1] + bx[n+1] = a
2
y[n] + abx[n] + bx[n+1], and see what the
resulting direct implementation would look like in Fig. 16.
Fig. 16: Look-ahead scheme for IIR
The circuit now looks much more favourable for timing improvements. The leftmost part looks
like an FIR and can be pipelined as much as necessary. The second part now contains two flip-flops in
series in the feedback path, which can be used for retiming. The technique we used is called ‘look-
ahead’ and is very common for boosting the speed of digital circuits.
6.2 Powering FPGAs
FPGAs are typically powered from various supply rails. They need different voltages for the internal
logic, the Input/Output (I/O) circuitry, and some analog blocks like PLLs. Typical specifications
J. SERRANO
242
13
include a ±5% tolerance on the actual value of the voltage and monotonic ramping of the supplies
during power-up. While it is not proven that ramping in a non-monotonic way would not work,
FPGAs are not tested that way after manufacturing, so it is better to guarantee a monotonic ramp in
order to avoid surprises. Devices also specify a minimum and a maximum ramping time for the
voltage rails. Again, this is just how they are tested after production, and it is very wise to follow these
guidelines.
An important aspect to bear in mind concerns in-rush current at power-up due to the decoupling
capacitors on the power supply rails. If C is the total capacitance, I
c
= C*ΔV/ΔT, so one might want to
slow the ramping process down using a soft-start circuit in order to avoid the kick-in of protection
mechanisms in regulators, which could in turn compromise monotonicity.
Sequencing of supply voltages, i.e., making one available, then another one and so on, was a
required practice in old technologies, and nowadays it is only recommended. It seems sensible that the
I/O stages get power only after the internal logic is properly configured. A Supply Voltage Supervisor
(SVS) chip can be used to control the process. Sequencing is also good to make sure that the main
(typically 5 V) rail feeding the regulators is well established (i.e., all capacitors charged) before they
begin requesting current from it. Otherwise the 5 V protection could trip and spikes could appear in
the output of the regulators.
The design of a proper bypassing network using capacitors is also a critical issue. A decoupling
network should look like a short to ground for all the frequencies of power supply noise we want to
reject. At high frequencies, like the ones of interest for this discussion, a capacitor chip can be
modelled as an equivalent RLC circuit to take into account the various imperfections in its design. The
parasitic inductance dominates at high frequencies, and is (almost) exclusively determined by the
package type of the capacitor. The global frequency response presents a downward slope at low
frequencies whose value depends on the capacitance, and an upward slope at high frequencies whose
value depends on the parasitic inductance. The minimum of the curve thus depends on the capacitance
value, and can be made arbitrarily wide by selecting a suitable set of capacitor values and placing them
in parallel. High-value capacitors take care of low-frequency perturbations and can be placed
relatively far away from the chip, while low values of capacitance (typically 10 nF), can be placed
close to the chip — ideally below it — to take care of the fast perturbations. Reference [6] can be
consulted for further details.
6.3 Interfacing to the outside world
Modern FPGAs have very versatile I/O blocks which make them easy to interface to other chips. In
this section, we look in particular at issues which could appear when interfacing to Analog to Digital
Converters (ADCs) or DACs.
Whenever a design deals with high-speed, high-pin-count parallel busses, as is the case often
when interfacing FPGAs and ADCs/DACs, there is potential for noise problems. This is because the
I/O drivers in the FPGAs commute state all at the same time, creating large current surges in the
Power Distribution System (PDS). The PDS should be well decoupled using the appropriate mix of
capacitors as discussed above, but it cannot filter all the noise at all frequencies. In addition, sampling
many bits at a high frequency can pose synchronization problems. If the clock edge is very close to the
transition of any of the data bits, a problem known as metastability — to be explained later — can
arise. It is therefore desirable to avoid simultaneous fast-switching of large busses if possible. One
example where this is possible is in the sampling of high frequency, low bandwidth analog signals.
According to sampling theory, there is no need to sample them in their main Nyquist zone, i.e., with at
least twice their frequency. It is sufficient to sample them at least faster than twice their bandwidth –
which can be significantly slower. This can be a solution for systems where latency is more or less a
secondary concern, but it might not be possible for feedback systems. Another possibility for
mitigating noise problems is to choose ADC and DAC chips which use differential signalling for the
INTRODUCTION TO FPGA DESIGN
243
14
data bits and the clock. Currents in differential signals go in through one line and out of the other,
without any net demand on the PDS. The use of differential signalling also creates negligible ground
bounce. Ground bounce is caused by the fact that the impedance between the ground pins and the
ground plane is not exactly zero. This can cause a perceived change in ground level, as seen by the
digital chip, when it consumes significant current. This impedance has a resistive component but also a
very important inductive component which will create voltage jumps as a function of dI/dt. Therefore,
another way to improve the noise problem is to feed the digital outputs of the ADC with the lowest
realistic supply voltage. Current generation ADCs can accept digital supplies in the range 2.0–2.5 V.
In addition, current can be reduced by placing resistors in series with the ADC outputs.
Another aspect to bear in mind when designing FPGA systems is the state of I/O drivers during
power-up. Most FPGA chips provide a possibility, through external jumpers, of selecting whether the
I/Os will be pulled-up or tri-stated during the power-up process. The tri-state option lets the designer
control the power-up state of each pin through external pull-up or pull-down resistors. This is
important if glitch-free operation is requested during startup.
6.4 Clock domains and metastability
Oftentimes a designer is faced with an input signal that is not synchronized with the system clock, i.e.,
its rising and falling edges do not maintain a constant delay with respect to the rising edge of the clock
signal. Let us imagine for example that we have a card where an FPGA is clocked by an on-board
100 MHz oscillator, and the card is fed with an external input representing the revolution frequency of
a synchrotron. Let us also assume that the revolution tick has to be fed to two different state machines
inside the FPGA, and that the correct functioning of this design relies on both state machines detecting
the revolution tick during the exact same period of the system clock, which is used as the clock for the
state machines.
A naïve design might split the revolution tick signal in two before feeding it to the state
machines. The problem with this solution is that the revolution tick might eventually, after going
through several layers of combinatorial logic, find itself at the D inputs of two different flip-flops
inside the FPGA. But because the propagation delays of the revolution signal going through the two
paths are different, one flip-flop might already clock it in as ‘1’ while the other still sees a ‘0’.
A less naïve designer would then propose to feed the revolution tick to the D input of a flip-flop
to begin with, and only then split it in two. Indeed, the rate of failures would go down, but every now
and then we would still see an incoherency between the two state machines. The culprit is an effect
known as ‘metastability’ which afflicts flip-flops when a transition at their D input occurs too close in
time to the rising edge in the clock input. In that case, their Q output hesitates until it finally settles to
one of the two possible output values. The resolution time can be arbitrarily long as we push the two
edges closer and closer in time. In our second design, from time to time the Q output of the
synchronizing flip-flop will go metastable, with a resolution time such that — on the next system
clock tick — one of the two subsequent flip-flops will already see a ‘1’ when the other one still sees a
‘0’.
While it seems that this could become a never-ending story, in fact, for all practical purposes,
the circuit in Fig. 17 will solve the problem.
Now, for typical system clock and asynchronous input frequencies, the chances that the second
flip-flop goes metastable after the first one did the same, one system clock tick earlier, are vanishingly
small. One can easily design a circuit that will fail on average once every million years.
J. SERRANO
244

15
Fig. 17: Two-flip-flop synchronizer
The discussion above applies equally well to any design with more than one clock domain
where data must be transferred from one domain to the other. By clock domain, we mean a part of the
design which is clocked by a single common clock. Let us imagine that a designer needs to transfer a
16-bit number from one domain to another. Inserting a synchronizer for each bit would not help, since
different flip-flops will see different set-up times of the data with respect to their clock. Indeed, these
set-up times vary with time in a random way! The solution is to design the emitter block so that it
asserts a data strobe when the data are ready, and holds the data stable for a suitable amount of time.
The receiver circuit can then sample the strobe with a two-flip-flop synchronizer and clock the data in
once it senses a ‘1’ on the strobe line. A variation on this circuit includes a handshake whereby the
receiver sends back an acknowledge line to the emitter, which in turn synchronizes it into its clock
domain. Once the emitter senses a ‘1’ on the acknowledge line, it knows it can change the state of the
data lines to prepare the next transfer.
Sometimes the above scheme will not work because data comes in bursts at a speed which
makes it impossible to perform the full handshake. In those cases, a First-In-First-Out (FIFO) block is
needed with each of its sides clocked by a different clock.
6.5 Safe design
There is at least one asynchronous signal in almost all designs: the external reset. In many cases, it is
very important to handle this signal properly in order to guarantee coherency of different parts of a
design. If we return to the example of the two different state machines within an FPGA, both running
this time off the same system clock, and we require that they both ‘wake up’ during the same clock
tick after the de-assertion of the reset signal, we find ourselves with a need to treat the reset signal as
we treated the revolution tick above, i.e., we need to feed it to a synchronizer before using it in the
design.
The best reset strategy, not always possible, is to synchronize the reset to the system clock and
then use it as a synchronous reset. This means that the reset line is treated as any other synchronous
signal. It will enter some combinatorial block and affect its output, which will then be fed to the D
input of a flip-flop. Chances are that the output of that combinatorial logic block will go to a
predefined ‘reset’ state irrespective of other inputs if the reset line is active, but there is really nothing
special about the reset line in this case from a topological point of view.
Things change if, for some reason like saving resources, the designer wants to use the
asynchronous reset input present in all flip-flops. There is still a certain guarantee of coherency if the
reset fed to these inputs has been properly synchronized in advance, but this will greatly depend on the
clock period and the delay to reach each asynchronous reset input. Typical place-and-route tools will
not include these paths in their timing analysis because they do not go from Q outputs to D inputs. It is
really best if the asynchronous reset can be avoided altogether.
Another important topic in safe design is that of complete state coverage in state machines. If a
state machine has five different states, it will need at least three signal lines to represent its current
INTRODUCTION TO FPGA DESIGN
245

16
state. But with three lines one can have eight different states, three of which will be illegal. It is the
designer’s responsibility to detect these states and take the state machine to a safe state if it goes to one
of them. Now, how can a state machine go to an illegal state if no combination of inputs and states is
supposed to take it there? The state vector is made of three lines, and each of these lines is — we can
assume this without loss of generality — fed from the Q output of a flip-flop. High-energy particles
crossing the FPGA can induce what is called a Single-Event Upset (SEU), flipping the state of one of
the flip-flops to a new one, which might make the new three-bit combination illegal. With process
geometries shrinking, one no longer needs a high-energy accelerator to produce SEUs. Atmospheric
particles will produce them at a rate high enough to make it a major concern for safety-critical
systems.
Sometimes in high-energy accelerator applications, an FPGA must live in a highly radioactive
environment. This is a completely different game. Here are three techniques designers use frequently
to make their designs more robust under such adverse conditions:
– Antifuse technology. An antifuse is an element that creates a short circuit when overheated, i.e.,
exactly the opposite of what a fuse does. FPGAs based on antifuse technology are inalterable at
least as far as the configuration memory is concerned. But we know that, among the RAM bits
of a typical FPGA, the vast majority of them are configuration bits, so antifuse technology is a
major improvement in terms of resistance to radiation. The negative side is the price of antifuse
chips and also their lower densities. These devices are roughly one generation behind in terms of
silicon processes.
– Scrubbing. As we said, most of the FPGA RAM bits that are susceptible of being affected by a
SEU are in fact configuration bits. One can read the configuration stream back repeatedly to
check if there has been any corruption, and then take corrective action if needed. The device that
scans the configuration bits must itself be more robust than the FPGA being checked. It is
typically antifuse-based.
– Triple Mode Redundancy (TMR). This technique consists in replicating the same piece of logic
three times and adding a set of voters to detect whether there was a SEU in one of the blocks.
Figure 18 shows the principle for the simple example of a counter. If a mismatch is found, the
losing counter will be informed and correct its value accordingly.
Fig. 18: TMR with state feedback
It is assumed that the probabilities to have a double upset that will affect two counters at the
same time are negligible, but this may not be a very realistic assumption with the ever-diminishing
process geometries. A single high-energy particle can indeed affect more than one transistor around
the impact area. This is why some vendors are developing software that automatically generates TMR
logic and places the different parts of the ensemble in different, geographically distant, areas of the
J. SERRANO
246

17
chip. Notice also that our FPGA now contains three counter outputs instead of one. With only one
output, a SEU in one of the output transistors could defeat the whole TMR scheme. If the counter
value is to be used outside the FPGA, decision logic must be implemented outside using a radiation-
hard scheme in order to work out the current value of the counter.
For unmatched reliability, radiation-hard antifuse products are available. Every flip-flop in these
devices is TMRed in silicon, with feedback TMR built in. Needless to say, these devices are extremely
expensive and reserved for the most demanding applications in terms of radiation hardness. The extra
logic needed for the TMR scheme and the state feedback are also a problem if excellent timing
performance is required.
References
[1] J.F. Wakerly, Digital Design: Principles and Practices, 4th ed. (Prentice Hall, Upper Saddle
River, NJ, 2006).
[2] A. Rushton, VHDL for Logic Synthesis, 2nd ed. (John Wiley & Sons, Chichester, 1998).
[3] U. Meyer-Baese, Digital Signal Processing with Field Programmable Gate Arrays, 3rd ed.
(Springer, Berlin, 2007).
[4] J.G. Proakis and D.K. Manolakis, Digital Signal Processing, 4th ed. (Prentice Hall, Upper
Saddle River, NJ, 2006).
[5] R. Andraka, A survey of CORDIC algorithms for FPGAs, Proc. 1998 ACM/SIGDA 6
th
International Symposium on Field Programmable Gate Arrays, Feb. 22–24, Monterrey, CA,
USA, pp. 191–200. URL: http://www.andraka.com/files/crdcsrvy.pdf.
[6] M. Alexander, Power Supply Distribution (PDS) Design: Using bypass/decoupling capacitors,
Xilinx application note 623. URL:
http://www.xilinx.com/support/documentation/application_notes/xapp623.pdf.
INTRODUCTION TO FPGA DESIGN
247
